
Bộ câu hỏi trắc nghiệm Lý thuyết điều khiển tự động - Phần 9
- 30/08/2021
- 25 Câu hỏi
- 931 Lượt xem
Trắc Nghiệm Hay giới thiệu đến các bạn Bộ câu hỏi trắc nghiệm Lý thuyết điều khiển tự động - Phần 9. Tài liệu bao gồm 25 câu hỏi kèm đáp án thuộc danh mục Khoa học - Kỹ thuật. Tài liệu này sẽ giúp các bạn ôn tập, củng cố lại kiến thức để chuẩn bị cho các kỳ thi sắp tới. Mời các bạn tham khảo!
Cập nhật ngày
18/10/2021
Thời gian
30 Phút
Tham gia thi
41 Lần thi
Câu 1: Hệ thống có các cực và zero như trên hình vẽ thì: 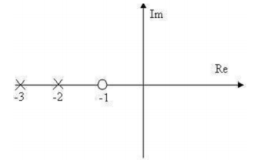
A. ổn định
B. không ổn định
C. ở biên giới ổn định
D. không xác định
Câu 2: Hệ thống có hàm truyền: \(G(s) = \frac{{3(s + 4)}}{{{s^2} + 2s + 1}}\)
A. z = -4 ; p1,2= -1
B. z = 4; p1,2= 1
C. z = 0 ; z = -4 ; p1,2= -1
D. z = 4 ; p1,2= -1
Câu 3: Hệ thống có hàm truyền hở thì hệ thống kính: \(G(s) = \frac{{3(s + 4)}}{{{s^2} + 2s + 1}}\)
A. ổn định
B. không ổn định
C. ở biên giới ổn định
D. chưa xác định
Câu 4: Khâu hiệu chỉnh PID liên tục có dạng:
A. \({K_p} + {K_I}s + \frac{{{K_D}}}{s}\)
B. \({K_p} + \frac{{{K_I}}}{s} + {K_D}s\)
C. \({K_p}s + \frac{{{K_I}}}{s} + {K_D}s\)
D. \(\frac{{{K_p}}}{s} + {K_I} + {K_D}s\)
Câu 5: Hệ thống tuyến tính là hệ thống:
A. Có tín hiệu vào là tuyến tính theo thời gian
B. Có tín hiệu ra là tuyến tính theo thời gian
C. Được mô tả bởi phương trình vi phân tuyến tính
D. Có tín hiệu ra và tín hiệu vào là tuyến tính theo thời gian
Câu 6: Yêu cầu đầu tiên đối với một hệ thống điều khiển tự động là:
A. Hệ thống phải giữ được trạng thái ổn định khi chịu tác động của tín hiệu vào và chịu ảnh hưởng của tín hiệu ra
B. Hệ thống phải giữ được trạng thái ổn định khi chịu tác động của tín hiệu ra và chịu ảnh hưởng của tín hiệu vào
C. Hệ thống phải giữ được trạng thái ổn định khi chịu tác động của tín hiệu vào và chịu ảnh hưởng của nhiễu lên hệ thống
D. Hệ thống phải giữ được trạng thái ổn định khi chịu tác động của tín hiệu vào và chịu ảnh hưởng của tần số lên hệ thống
Câu 7: Tìm nghiệm của hệ thống có phương trình đặc tính sau: \({s^2} + 6s + 5 = 0\)
A. \({s_1} = - 1;{\rm{ }}{{\rm{s}}_2} = - 5\)
B. \({s_1} = - 1 + j;{\rm{ }}{{\rm{s}}_2} = - 5 + j3\)
C. \({s_1} = - 1 + j3;{\rm{ }}{{\rm{s}}_2} = - 5 + 2j5\)
D. \({s_1} = - 3;{\rm{ }}{{\rm{s}}_2} = - 2\)
Câu 8: Cho hàm truyền hãy lập phương trình trạng thái.\(G(s) = \frac{{20}}{{{s^2} + 2s + 8}}\)
A. \(A = \left[ {\begin{array}{*{20}{c}} 0&1\\ { - 3}&{ - 8} \end{array}} \right]{\rm{ ; B = }}\left[ \begin{array}{l} 20\\ 0 \end{array} \right]{\rm{ ; C = }}\left[ {\begin{array}{*{20}{c}} 1&0 \end{array}} \right]\)
B. \(A = \left[ {\begin{array}{*{20}{c}} 0&1\\ { - 2}&{ - 1} \end{array}} \right]{\rm{ ; B = }}\left[ \begin{array}{l} 0\\ 20 \end{array} \right]{\rm{ ; C = }}\left[ {\begin{array}{*{20}{c}} 1&0 \end{array}} \right]\)
C. \(A = \left[ {\begin{array}{*{20}{c}} 0&1\\ { - 8}&{ - 2} \end{array}} \right]{\rm{ ; B = }}\left[ \begin{array}{l} 0\\ 20 \end{array} \right]{\rm{ ; C = }}\left[ {\begin{array}{*{20}{c}} 1&0 \end{array}} \right]\)
D. \(A = \left[ {\begin{array}{*{20}{c}} 1&1\\ { - 2}&{ - 8} \end{array}} \right]{\rm{ ; B = }}\left[ \begin{array}{l} 20\\ 0 \end{array} \right]{\rm{ ; C = }}\left[ {\begin{array}{*{20}{c}} 1&0 \end{array}} \right]\)
Câu 9: Hàm truyền đạt \(G(s) = \frac{{{V_o}(s)}}{{{V_i}(s)}}\) của mạch điện ở hình sau là: 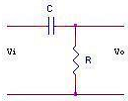
A. \(\frac{{RCs}}{{RCs + 1}}\)
B. \(\frac{1}{{RCs + 1}}\frac{\pi }{3}\)
C. \(1 - RCs\)
D. \(R + RCs\)
Câu 10: Hệ thống phi tuyến là hệ thống:
A. Có một ngõ vào một ngõ ra
B. Có tín hiệu ra là phi tuyến theo thời gian
C. Được mô tả bởi phương trình vi phân phi tuyến
D. Nhiều ngõ vào và một ngõ ra
Câu 11: Biểu đồ Nyquist (đường cong Nyquist) là:
A. Đồ thị biểu diễn đặc tính tần số G(jω) trong hệ toạ độ Đề-các khi thay đổi từ 0→∞
B. Đồ thị biểu diễn đặc tính tần số G(jω) trong hệ toạ độ cực khi ω thay đổi từ 0→∞
C. Đồ thị biểu diễn đặc tính tần số G(jω) trong hệ toạ độ cầu khi thay đổi từ 0→∞
D. Đồ thị biểu diễn đặc tính tần số G(jω) trong hê toạ độ trụ khi ω thay đổi từ 0→∞
Câu 12: Khi thêm một cực có phần thực âm vào hàm truyền hệ hở thì:
A. Quĩ đạo nghiệm số của hệ kín có xu hướng tiến về phía trục thực, hệ thống sẽ ổn định hơn, độ dự trữ biên và độ dự trữ pha tăng, độ vọt lố giảm
B. Quĩ đạo nghiệm số của hệ kín có xu hướng tiến gần về phía trục ảo, hệ thống sẽ kém ổn định hơn, độ dự trữ biên và độ dự trữ pha tăng, độ vọt lố giảm
C. Quĩ đạo nghiệm số của hệ kín có xu hướng tiến gần về phía trục ảo, hệ thống sẽ kém ổn định hơn, độ dự trữ biên và độ dự trữ pha giảm, độ vọt lố tăng
D. Quĩ đạo nghiệm số của hệ kín có xu hướng tiến gần về phía trục thực, hệ thống sẽ kém ổn định hơn, độ dự trữ biên và độ dự trữ pha giảm, độ vọt lố tăng
Câu 13: Tìm số nhánh của qũi đạo nghiệm số của hệ thống hồi tiếp âm đơn vị có hàm truyền hệ hở là: \(G(s) = \frac{{K(1 + 0.1s)}}{{{{(1 + 0.01s)}^2}}}\)
A. Quĩ đạo nghiệm số có 1 nhánh
B. Quĩ đạo nghiệm số có 3 nhánh
C. Quĩ đạo nghiệm số có 2 nhánh
D. Quĩ đạo nghiệm số có 4 nhánh
Câu 14: ADC là:
A. Bộ chuyển đổi tín hiệu từ dạng số sang dạng tương tự
B. Bộ khuếch đại tín hiệu
C. Bộ chuyển đổi tín hiệu từ dạng tương tự sang dạng số
D. Bộ thay đổi tần số của tín hiệu vào
Câu 15: ADC là:
A. Bộ chuyển đổi tín hiệu từ dạng số sang dạng tương tự
B. Bộ khuếch đại tín hiệu
C. Bộ chuyển đổi tín hiệu từ dạng tương tự sang dạng số
D. Bộ thay đổi tần số của tín hiệu vào
Câu 16: Hàm truyền đạt \(G(s) = \frac{{C(s)}}{{R(s)}}\) của hệ thống ở hình sau là:
A. \(\frac{{{G_1}{G_2}{G_3}}}{{1 + {G_1}{G_2}{G_3}{G_4}}}\)
B. \(\frac{{{G_1}{G_2}{G_3}}}{{1 - {G_1}{G_2}{G_3}{G_4}}}\)
C. \(\frac{{{G_1}{G_2}}}{{1 + {G_1}{G_2}{G_3}{G_4}}}\)
D. \(\frac{{{G_1}{G_2}{G_3}}}{{1 + {G_1}{G_2}{G_4}}}\)
Câu 17: Cho phương trình đặc trưng \({s^4} + 12,5{s^3} + {s^2} + 5s + K = 0\) . Hãy xác định K để hệ thống ổn định
A. K>0
B. K>12,5
C. 0<K<1
D. 0<K<0,24
Câu 18: Các cách đánh giá thường được dùng đề xét ổn định cho hệ liên tục là:
A. Tiêu chuẩn ổn định Routh- Hurwitz; Nyquist-Bode
B. Tiêu chuẩn ổn định Routh- Hurwitz; Nyquist-Bode và phương pháp quỹ đạo nghiệm số
C. Tiêu chuẩn ổn định Routh- Hurwitz; Mikhailov-Nyquist-Bode và phương pháp chia miền ổn định
D. Tiêu chuẩn ổn định tần số, tiêu chuẩn ổn định đại số và phương pháp quỹ đạo nghiệm số
Câu 19: Cho hệ có phương trình đặc trưng \({s^4} + 2{s^3} + 3{s^2} + 4s + 5 = 0\) . Xét tính ổn định của hệ thống, và cho biết có bao nhiêu nghiệm bên trái, bao nhiêu nghiệm bên phải mặt phẳng phức:
A. Hệ thống ổn định, có 4 nghiệm nằm bên trái mặt phẳng phức
B. Hệ thống không ổn định, có 3 nghiệm bên phải mặt phẳng phức, 1 nghiệm bên trái mặt phẳng phức
C. Hệ thống không ổn định, có 2 nghiệm bên phải mặt phẳng phức, 2 nghiệm bên trái mặt phẳng phức
D. Hệ thống không ổn định, có 1 nghiệm bên phải mặt phẳng phức, 3 nghiệm bên trái mặt phẳng phức
Câu 20: Xét tính ổn định của hệ thống có phương trình đặc trưng: \({s^4} + 2{s^3} + 4{s^2} + 8s + 3 = 0\)
A. Hệ thống ở biên giới ổn định
B. Hệ thống không ổn định
C. Hệ thống ổn định
D. Hệ thống có 3 nghiệm
Câu 21: Khâu hiệu chỉnh sớm trễ pha gồm:
A. Một khâu trễ pha mắc nối tiếp với một khâu sớm pha
B. Một khâu trễ pha mắc song song với một khâu sớm pha
C. Một khâu trễ pha mắc hồi tiếp với một khâu sớm pha
D. Một khâu trễ pha mắc hỗn hợp với hai khâu sớm pha
Câu 22: Bản chất của biến đổi Z là:
A. Rời rạc hóa tín hiệu
B. Tuyến tính hóa tín hiệu
C. Lấy tích phân tín hiệu
D. Lấy vi phân tín hiệu
Câu 24: Tín hiệu ra của bộ chuyển đổi A/D:
A. Tín hiệu liên tục
B. Tín hiệu số
C. Sóng sin
D. Xung vuông

Chủ đề: Bộ câu hỏi trắc nghiệm Lý thuyết điều khiển tự động có đáp án Xem thêm...
- 41 Lượt thi
- 30 Phút
- 25 Câu hỏi
- Sinh viên
Cùng chủ đề Bộ câu hỏi trắc nghiệm Lý thuyết điều khiển tự động có đáp án

- 1.9K
- 145
- 25
-
 52 người đang thi
52 người đang thi

- 1.9K
- 164
- 20
-
36 người đang thi

- 1.7K
- 114
- 25
-
60 người đang thi

- 1.1K
- 78
- 25
-
27 người đang thi
Chia sẻ:
Đăng Nhập để viết bình luận