Câu hỏi:
Hàm truyền đạt \(G(s) = \frac{{{V_o}(s)}}{{{V_i}(s)}}\) của mạch điện ở hình sau là: 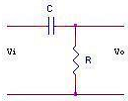
A. \(\frac{{RCs}}{{RCs + 1}}\)
B. \(\frac{1}{{RCs + 1}}\frac{\pi }{3}\)
C. \(1 - RCs\)
D. \(R + RCs\)
Câu 1: Hàm truyền đạt \(G(s) = \frac{{C(s)}}{{R(s)}}\) của hệ thống ở hình sau là:
A. \(\frac{{{G_1}{G_2}{G_3}}}{{1 + {G_1}{G_2}{G_3}{G_4}}}\)
B. \(\frac{{{G_1}{G_2}{G_3}}}{{1 - {G_1}{G_2}{G_3}{G_4}}}\)
C. \(\frac{{{G_1}{G_2}}}{{1 + {G_1}{G_2}{G_3}{G_4}}}\)
D. \(\frac{{{G_1}{G_2}{G_3}}}{{1 + {G_1}{G_2}{G_4}}}\)
30/08/2021 2 Lượt xem
Câu 2: Xét tính ổn định của hệ thống có phương trình đặc trưng: \({s^4} + 2{s^3} + 4{s^2} + 8s + 3 = 0\)
A. Hệ thống ở biên giới ổn định
B. Hệ thống không ổn định
C. Hệ thống ổn định
D. Hệ thống có 3 nghiệm
30/08/2021 2 Lượt xem
Câu 3: Bản chất của biến đổi Z là:
A. Rời rạc hóa tín hiệu
B. Tuyến tính hóa tín hiệu
C. Lấy tích phân tín hiệu
D. Lấy vi phân tín hiệu
30/08/2021 2 Lượt xem
Câu 4: ADC là:
A. Bộ chuyển đổi tín hiệu từ dạng số sang dạng tương tự
B. Bộ khuếch đại tín hiệu
C. Bộ chuyển đổi tín hiệu từ dạng tương tự sang dạng số
D. Bộ thay đổi tần số của tín hiệu vào
30/08/2021 3 Lượt xem
Câu 5: Tìm nghiệm của hệ thống có phương trình đặc tính sau: \({s^2} + 6s + 5 = 0\)
A. \({s_1} = - 1;{\rm{ }}{{\rm{s}}_2} = - 5\)
B. \({s_1} = - 1 + j;{\rm{ }}{{\rm{s}}_2} = - 5 + j3\)
C. \({s_1} = - 1 + j3;{\rm{ }}{{\rm{s}}_2} = - 5 + 2j5\)
D. \({s_1} = - 3;{\rm{ }}{{\rm{s}}_2} = - 2\)
30/08/2021 2 Lượt xem
30/08/2021 2 Lượt xem

Câu hỏi trong đề: Bộ câu hỏi trắc nghiệm Lý thuyết điều khiển tự động - Phần 9
- 41 Lượt thi
- 30 Phút
- 25 Câu hỏi
- Sinh viên
Cùng chủ đề Bộ câu hỏi trắc nghiệm Lý thuyết điều khiển tự động có đáp án

- 1.9K
- 145
- 25
-
 13 người đang thi
13 người đang thi

- 1.9K
- 164
- 20
-
63 người đang thi

- 1.7K
- 114
- 25
-
24 người đang thi

- 1.1K
- 78
- 25
-
37 người đang thi
Chia sẻ:
Đăng Nhập để viết bình luận