Câu hỏi: Cho hàm truyền hãy lập phương trình trạng thái.\(G(s) = \frac{{20}}{{{s^2} + 2s + 8}}\)
A. \(A = \left[ {\begin{array}{*{20}{c}} 0&1\\ { - 3}&{ - 8} \end{array}} \right]{\rm{ ; B = }}\left[ \begin{array}{l} 20\\ 0 \end{array} \right]{\rm{ ; C = }}\left[ {\begin{array}{*{20}{c}} 1&0 \end{array}} \right]\)
B. \(A = \left[ {\begin{array}{*{20}{c}} 0&1\\ { - 2}&{ - 1} \end{array}} \right]{\rm{ ; B = }}\left[ \begin{array}{l} 0\\ 20 \end{array} \right]{\rm{ ; C = }}\left[ {\begin{array}{*{20}{c}} 1&0 \end{array}} \right]\)
C. \(A = \left[ {\begin{array}{*{20}{c}} 0&1\\ { - 8}&{ - 2} \end{array}} \right]{\rm{ ; B = }}\left[ \begin{array}{l} 0\\ 20 \end{array} \right]{\rm{ ; C = }}\left[ {\begin{array}{*{20}{c}} 1&0 \end{array}} \right]\)
D. \(A = \left[ {\begin{array}{*{20}{c}} 1&1\\ { - 2}&{ - 8} \end{array}} \right]{\rm{ ; B = }}\left[ \begin{array}{l} 20\\ 0 \end{array} \right]{\rm{ ; C = }}\left[ {\begin{array}{*{20}{c}} 1&0 \end{array}} \right]\)
30/08/2021 2 Lượt xem
Câu 2: Hệ thống có hàm truyền hở thì hệ thống kính: \(G(s) = \frac{{3(s + 4)}}{{{s^2} + 2s + 1}}\)
A. ổn định
B. không ổn định
C. ở biên giới ổn định
D. chưa xác định
30/08/2021 2 Lượt xem
Câu 3: Tìm số nhánh của qũi đạo nghiệm số của hệ thống hồi tiếp âm đơn vị có hàm truyền hệ hở là: \(G(s) = \frac{{K(1 + 0.1s)}}{{{{(1 + 0.01s)}^2}}}\)
A. Quĩ đạo nghiệm số có 1 nhánh
B. Quĩ đạo nghiệm số có 3 nhánh
C. Quĩ đạo nghiệm số có 2 nhánh
D. Quĩ đạo nghiệm số có 4 nhánh
30/08/2021 2 Lượt xem
Câu 4: Tín hiệu ra của bộ chuyển đổi A/D:
A. Tín hiệu liên tục
B. Tín hiệu số
C. Sóng sin
D. Xung vuông
30/08/2021 2 Lượt xem
Câu 5: Khâu hiệu chỉnh PID liên tục có dạng:
A. \({K_p} + {K_I}s + \frac{{{K_D}}}{s}\)
B. \({K_p} + \frac{{{K_I}}}{s} + {K_D}s\)
C. \({K_p}s + \frac{{{K_I}}}{s} + {K_D}s\)
D. \(\frac{{{K_p}}}{s} + {K_I} + {K_D}s\)
30/08/2021 2 Lượt xem
Câu 6: Hệ thống có các cực và zero như trên hình vẽ thì: 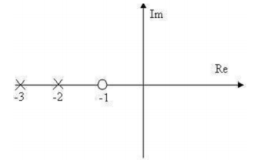
A. ổn định
B. không ổn định
C. ở biên giới ổn định
D. không xác định
30/08/2021 2 Lượt xem

Câu hỏi trong đề: Bộ câu hỏi trắc nghiệm Lý thuyết điều khiển tự động - Phần 9
- 41 Lượt thi
- 30 Phút
- 25 Câu hỏi
- Sinh viên
Cùng chủ đề Bộ câu hỏi trắc nghiệm Lý thuyết điều khiển tự động có đáp án

- 1.9K
- 145
- 25
-
 47 người đang thi
47 người đang thi

- 1.9K
- 164
- 20
-
27 người đang thi

- 1.7K
- 114
- 25
-
19 người đang thi

- 1.1K
- 78
- 25
-
44 người đang thi
Chia sẻ:
Đăng Nhập để viết bình luận