Câu hỏi: Khi thêm một cực có phần thực âm vào hàm truyền hệ hở thì:
A. Quĩ đạo nghiệm số của hệ kín có xu hướng tiến về phía trục thực, hệ thống sẽ ổn định hơn, độ dự trữ biên và độ dự trữ pha tăng, độ vọt lố giảm
B. Quĩ đạo nghiệm số của hệ kín có xu hướng tiến gần về phía trục ảo, hệ thống sẽ kém ổn định hơn, độ dự trữ biên và độ dự trữ pha tăng, độ vọt lố giảm
C. Quĩ đạo nghiệm số của hệ kín có xu hướng tiến gần về phía trục ảo, hệ thống sẽ kém ổn định hơn, độ dự trữ biên và độ dự trữ pha giảm, độ vọt lố tăng
D. Quĩ đạo nghiệm số của hệ kín có xu hướng tiến gần về phía trục thực, hệ thống sẽ kém ổn định hơn, độ dự trữ biên và độ dự trữ pha giảm, độ vọt lố tăng
Câu 1: Xét tính ổn định của hệ thống có phương trình đặc trưng: \({s^4} + 2{s^3} + 4{s^2} + 8s + 3 = 0\)
A. Hệ thống ở biên giới ổn định
B. Hệ thống không ổn định
C. Hệ thống ổn định
D. Hệ thống có 3 nghiệm
30/08/2021 2 Lượt xem
Câu 2: Hệ thống phi tuyến là hệ thống:
A. Có một ngõ vào một ngõ ra
B. Có tín hiệu ra là phi tuyến theo thời gian
C. Được mô tả bởi phương trình vi phân phi tuyến
D. Nhiều ngõ vào và một ngõ ra
30/08/2021 2 Lượt xem
Câu 3: ADC là:
A. Bộ chuyển đổi tín hiệu từ dạng số sang dạng tương tự
B. Bộ khuếch đại tín hiệu
C. Bộ chuyển đổi tín hiệu từ dạng tương tự sang dạng số
D. Bộ thay đổi tần số của tín hiệu vào
30/08/2021 3 Lượt xem
Câu 4: Yêu cầu đầu tiên đối với một hệ thống điều khiển tự động là:
A. Hệ thống phải giữ được trạng thái ổn định khi chịu tác động của tín hiệu vào và chịu ảnh hưởng của tín hiệu ra
B. Hệ thống phải giữ được trạng thái ổn định khi chịu tác động của tín hiệu ra và chịu ảnh hưởng của tín hiệu vào
C. Hệ thống phải giữ được trạng thái ổn định khi chịu tác động của tín hiệu vào và chịu ảnh hưởng của nhiễu lên hệ thống
D. Hệ thống phải giữ được trạng thái ổn định khi chịu tác động của tín hiệu vào và chịu ảnh hưởng của tần số lên hệ thống
30/08/2021 1 Lượt xem
Câu 5: Tín hiệu ra của bộ chuyển đổi A/D:
A. Tín hiệu liên tục
B. Tín hiệu số
C. Sóng sin
D. Xung vuông
30/08/2021 2 Lượt xem
Câu 6: Hệ thống có các cực và zero như trên hình vẽ thì: 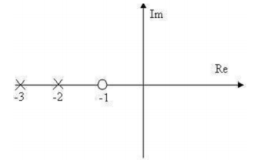
A. ổn định
B. không ổn định
C. ở biên giới ổn định
D. không xác định
30/08/2021 2 Lượt xem

Câu hỏi trong đề: Bộ câu hỏi trắc nghiệm Lý thuyết điều khiển tự động - Phần 9
- 41 Lượt thi
- 30 Phút
- 25 Câu hỏi
- Sinh viên
Cùng chủ đề Bộ câu hỏi trắc nghiệm Lý thuyết điều khiển tự động có đáp án

- 1.9K
- 145
- 25
-
 95 người đang thi
95 người đang thi

- 1.9K
- 164
- 20
-
70 người đang thi

- 1.7K
- 114
- 25
-
49 người đang thi

- 1.1K
- 78
- 25
-
53 người đang thi
Chia sẻ:
Đăng Nhập để viết bình luận