Câu hỏi:
Hệ thống có các cực và zero như trên hình vẽ thì: 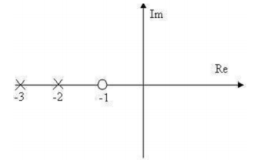
A. ổn định
B. không ổn định
C. ở biên giới ổn định
D. không xác định
Câu 1: Khâu hiệu chỉnh PID liên tục có dạng:
A. \({K_p} + {K_I}s + \frac{{{K_D}}}{s}\)
B. \({K_p} + \frac{{{K_I}}}{s} + {K_D}s\)
C. \({K_p}s + \frac{{{K_I}}}{s} + {K_D}s\)
D. \(\frac{{{K_p}}}{s} + {K_I} + {K_D}s\)
30/08/2021 2 Lượt xem
Câu 2: Hệ thống tuyến tính là hệ thống:
A. Có tín hiệu vào là tuyến tính theo thời gian
B. Có tín hiệu ra là tuyến tính theo thời gian
C. Được mô tả bởi phương trình vi phân tuyến tính
D. Có tín hiệu ra và tín hiệu vào là tuyến tính theo thời gian
30/08/2021 2 Lượt xem
Câu 3: Các cách đánh giá thường được dùng đề xét ổn định cho hệ liên tục là:
A. Tiêu chuẩn ổn định Routh- Hurwitz; Nyquist-Bode
B. Tiêu chuẩn ổn định Routh- Hurwitz; Nyquist-Bode và phương pháp quỹ đạo nghiệm số
C. Tiêu chuẩn ổn định Routh- Hurwitz; Mikhailov-Nyquist-Bode và phương pháp chia miền ổn định
D. Tiêu chuẩn ổn định tần số, tiêu chuẩn ổn định đại số và phương pháp quỹ đạo nghiệm số
30/08/2021 3 Lượt xem
Câu 4: Tín hiệu ra của bộ chuyển đổi A/D:
A. Tín hiệu liên tục
B. Tín hiệu số
C. Sóng sin
D. Xung vuông
30/08/2021 2 Lượt xem
Câu 5: Bản chất của biến đổi Z là:
A. Rời rạc hóa tín hiệu
B. Tuyến tính hóa tín hiệu
C. Lấy tích phân tín hiệu
D. Lấy vi phân tín hiệu
30/08/2021 2 Lượt xem
Câu 6: Xét tính ổn định của hệ thống có phương trình đặc trưng: \({s^4} + 2{s^3} + 4{s^2} + 8s + 3 = 0\)
A. Hệ thống ở biên giới ổn định
B. Hệ thống không ổn định
C. Hệ thống ổn định
D. Hệ thống có 3 nghiệm
30/08/2021 2 Lượt xem

Câu hỏi trong đề: Bộ câu hỏi trắc nghiệm Lý thuyết điều khiển tự động - Phần 9
- 41 Lượt thi
- 30 Phút
- 25 Câu hỏi
- Sinh viên
Cùng chủ đề Bộ câu hỏi trắc nghiệm Lý thuyết điều khiển tự động có đáp án

- 2.0K
- 145
- 25
-
 82 người đang thi
82 người đang thi

- 1.9K
- 164
- 20
-
40 người đang thi

- 1.7K
- 114
- 25
-
29 người đang thi

- 1.1K
- 78
- 25
-
25 người đang thi
Chia sẻ:
Đăng Nhập để viết bình luận