Câu hỏi:
Phương trình đặc tính của hệ thống như hình vẽ là? 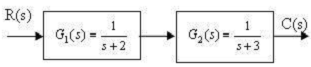
A. s2+5s+6 = 0
B. s2+5s-6 = 0
C. s2-5s+6 = 0
D. s2-5s-6 = 0
Câu 1: Khâu tỉ lệ có hàm truyền G(s)=K
A. Đáp ứng biên độ M(ω)=K, đáp ứng pha φ(ω)=0
B. Đáp ứng biên độ M(ω)=K, đáp ứng pha φ(ω)=+90o
C. Đáp ứng biên độ M(ω)=K, không có đáp ứng pha
D. Đáp ứng biên độ M(ω)=K, đáp ứng pha φ(ω)= -90o
30/08/2021 2 Lượt xem
Câu 2: Các khâu động học cơ bản là các phần tử của hệ thống điều chỉnh tự động, chúng có các tính chất như sau?
A. Chỉ có một tín hiệu vào và một tín hiệu ra
B. Tín hiệu chỉ truyền đi một chiều
C. Quá trình động học của phần tử được mô tả bằng phương trình vi phân không quá bậc hai
D. Cả 3 đáp án trên
30/08/2021 2 Lượt xem
Câu 3: Hệ phi tuyến có thể ổn định trong:
A. Phạm vi rộng nếu độ lệch ban đầu nhỏ
B. Phạm vi rộng nếu độ lệch ban đầu lớn
C. Phạm vi hẹp nếu độ lệch ban đầu lớn
D. Phạm vi hẹp nếu độ lệch ban đầu nhỏ
30/08/2021 2 Lượt xem
Câu 4: Tần số cắt pha ω-πlà tần số tại đó pha của đặc tính tần số:
A. φ(ω-π) = -90o
B. φ(ω-π)= -45o
C. φ(ω-π) = 180o
D. φ(ω-π) = -180o
30/08/2021 2 Lượt xem
Câu 5: Phương trình đặc tính của hệ thống như hình vẽ là? 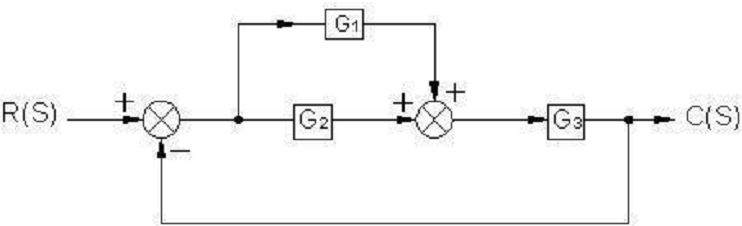
A. 1+G1G3-G2G3 = 0
B. 1+G1G3+G2G3 = 0
C. 1-G2(G3 + G1) = 0
D. 1-G2(G3 – G1) = 0
30/08/2021 3 Lượt xem
Câu 6: Nếu hàm quá độ của khâu khuếch đại h(t) = k.1(t) thì hàm trọng lượng k(t) bằng bao nhiêu?
A. k(t) = k.δ(t)
B. k(t) = k.t
C. k(t) = k.1(t)
D. k(t) = k/δ(t)
30/08/2021 2 Lượt xem

Câu hỏi trong đề: Bộ câu hỏi trắc nghiệm Lý thuyết điều khiển tự động - Phần 4
- 78 Lượt thi
- 30 Phút
- 25 Câu hỏi
- Sinh viên
Cùng chủ đề Bộ câu hỏi trắc nghiệm Lý thuyết điều khiển tự động có đáp án

- 1.9K
- 145
- 25
-
 98 người đang thi
98 người đang thi

- 1.9K
- 164
- 20
-
91 người đang thi

- 1.7K
- 114
- 25
-
35 người đang thi

- 1.3K
- 64
- 25
-
29 người đang thi
Chia sẻ:
Đăng Nhập để viết bình luận