Câu hỏi: Biểu thức sai số xác lập cho hệ thống sau:
A. \({e_{xl}} = \mathop {\lim }\limits_{s \to 0} \frac{{sR(s)}}{{1 + G(s)H(s)}}\)
B. \({e_{xl}} = \mathop {\lim }\limits_{s \to \infty } \frac{{sR(s)}}{{1 + G(s)H(s)}}\)
C. \({e_{xl}} = \mathop {\lim }\limits_{s \to \infty } \frac{{R(s)}}{{1 + G(s)H(s)}}\)
D. \({e_{xl}} = \mathop {\lim }\limits_{s \to 0} \frac{{sR(s)}}{{1 + H(s)}}\)
Câu 1: Phương trình đặc tính của hệ thống như hình vẽ là? 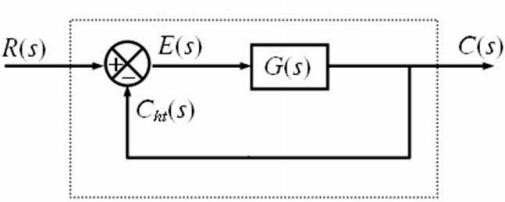
A. 1+G(s) = 0
B. 1-G(s) = 0
C. 1+G(s).H(s) = 0
D. 1-G(s).H(s) = 0
30/08/2021 3 Lượt xem
Câu 2: Đặc tính pha tần số của hệ thống được xác định bởi công thức nào dưới đây với P(ω), Q(ω) lần lượt là phần thực và phần ảo của hàm truyền tần số của hệ đó:
A. φ(ω) = arctg[P(ω).Q(ω)]
B. φ(ω) = arctg[P(ω)/Q(ω)]
C. φ(ω) = arctg[P(ω) - Q(ω)]
D. φ(ω) = arctg[Q(ω)/P(ω)]
30/08/2021 2 Lượt xem
Câu 3: Đặc tính biên độ tần số của hệ thống được xác định bởi công thức nào dưới đây với P(ω), Q(ω) lần lượt là phần thực và phần ảo của hàm truyền tần số của hệ đó:
A. A2(ω) = P(ω) + Q(ω)
B. A2(ω) = P(ω) - Q(ω)
C. A2(ω) = P2(ω) + Q2(ω)
D. A2(ω) = P2(ω) – Q2(ω)
30/08/2021 2 Lượt xem
Câu 4: Cho biết vị trí cân bằng ở biên giới ổn định trong hình sau:
A. Vị trí a
B. Vị trí b
C. Vị trí c
D. Vị trí d
30/08/2021 3 Lượt xem
Câu 5: Hệ thống rời rạc được mô tả bằng phương trình sai phân: c(k+4) + 4c(k+3) + 2c(k+2) + c(k+1) + 5c(k) = r(k+1) + 5r(k) , b ậc của hệ thống là:
A. Bậc 1
B. Bậc 2
C. Bậc 3
D. Bậc 4
30/08/2021 3 Lượt xem
Câu 6: Đối với bài toán phân tích hệ thống thì vấn đề đặt ra là:
A. Đánh giá chất lượng của hệ thống
B. Thiết kế bộ điều khiển để hệ thống được thoả mãn các yêu cầu về chất lượng
C. Tìm đáp ứng và đánh giá chất lượng của hệ
D. Tìm đáp ứng của hệ thống
30/08/2021 3 Lượt xem

Câu hỏi trong đề: Bộ câu hỏi trắc nghiệm Lý thuyết điều khiển tự động - Phần 4
- 78 Lượt thi
- 30 Phút
- 25 Câu hỏi
- Sinh viên
Cùng chủ đề Bộ câu hỏi trắc nghiệm Lý thuyết điều khiển tự động có đáp án

- 1.9K
- 145
- 25
-
 25 người đang thi
25 người đang thi

- 1.9K
- 164
- 20
-
66 người đang thi

- 1.7K
- 114
- 25
-
87 người đang thi

- 1.3K
- 64
- 25
-
80 người đang thi
Chia sẻ:
Đăng Nhập để viết bình luận