Câu hỏi:
Hệ thống có quỹ đạo nghiệm số như hình vẽ: 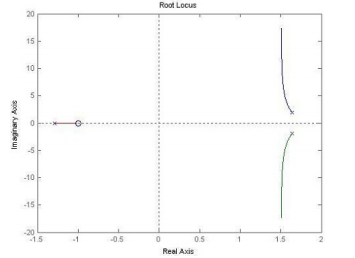
A. Hệ thống ổn định
B. Hệ thống không ổn định
C. Hệ thống nằm ở biên giới ổn định
D. Hệ thống có 4 nghiệm cực
Câu 1: Hàm truyền của hiệu chỉnh tích phân tỉ lệ PI(proportional integral) liên tục có dạng:
A. \({G_C}(s) = {K_p} + {K_I}s\)
B. \({G_C}(s) = {K_p}s + {K_I}\)
C. \({G_C}(s) = {K_p} + \frac{{{K_I}}}{s}\)
D. \({G_C}(s) = {K_p} - {K_I}s\)
30/08/2021 3 Lượt xem
Câu 2: Quĩ đạo nghiệm số là:
A. Tập hợp tất cả các nghiệm của phương trình đặc tính của hệ thống khi có một thông số nào đó trong hệ thống thay đổi từ -∞ →0
B. Tập hợp tất cả các nghiệm của phương trình đặc tính của hệ thống khi có một thông số nào đó trong hệ thống thay đổi từ 0 →+∞
C. Tập hợp tất cả các nghiệm của phương trình đặc tính của hệ thống khi có một thông số nào đó trong hệ thống thay đổi từ -∞ →+∞
D. Tập hợp các zero của hệ thống
30/08/2021 2 Lượt xem
Câu 3: Bộ bù trễ pha được sử dụng khi:
A. Muốn giảm sai số xác lập của hệ thống
B. Muốn tăng sai số xác lập của hệ thống
C. Muốn tăng thời gian đáp ứng quá độ của hệ thống
D. Tín hiệu vào của hệ thống là hàm nấc đơn vị
30/08/2021 2 Lượt xem
Câu 4: Chu kỳ lấy mẫu T là:
A. Khoảng thời gian giữa 2 lần lấy mẫu
B. Khoảng thời gian giữa 2 lần lấy mẫu liên tiếp
C. Khoảng thời gian lấy mẫu
D. Khoảng thời gian ngắn nhất mà tín hiệu lặp lại trạng thái ban đầu
30/08/2021 2 Lượt xem
Câu 5: Đơn vị dB/dec có nghĩa là:
A. decibel/decimal
B. decibel/decade
C. decibel/decimet
D. decibel
30/08/2021 2 Lượt xem
Câu 6: Cho hệ có phương trình đặc trưng \({s^3} + 20{s^2} + 10s + 100 = 0\)
A. Hệ thống không ổn định, có 3 nghiệm bên phải mặt phẳng phức
B. Hệ thống ổn định, không có nghiệm có phần thực dương
C. Hệ thống không ổn định, có 2 nghiệm bên phải mặt phẳng phức, 1 nghiệm bên trái mặt phẳng phức
D. Hệ thống không ổn định, có 1 nghiệm bên phải mặt phẳng phức, 2 nghiệm bên trái mặt phẳng phức
30/08/2021 2 Lượt xem

Câu hỏi trong đề: Bộ câu hỏi trắc nghiệm Lý thuyết điều khiển tự động - Phần 2
- 145 Lượt thi
- 30 Phút
- 25 Câu hỏi
- Sinh viên
Cùng chủ đề Bộ câu hỏi trắc nghiệm Lý thuyết điều khiển tự động có đáp án

- 1.9K
- 164
- 20
-
 52 người đang thi
52 người đang thi

- 1.7K
- 114
- 25
-
18 người đang thi

- 1.1K
- 78
- 25
-
30 người đang thi

- 1.3K
- 64
- 25
-
52 người đang thi
Chia sẻ:
Đăng Nhập để viết bình luận