Câu hỏi:
Hệ phương trình trạng thái được mô tả dưới dạng ma trận, với: \(\left\{ \begin{array}{l} x(t) = Ax(t) + Br(t)\\ c(t) = Cx(t) \end{array} \right.\)
A. C là ma trân {1 x n}
B. C là ma trận {n x 1}
C. C là ma trận {n x n}
D. C là ma trận {n x m}, với n khác m
Câu 1: Theo định lý Shanon để có thể phục hồi dữ liệu sau khi lấy mẫu mà không bị méo dạng thì:
A. f=2fc
B. f ≥ 2fc
C. Tần số lấy mẫu được chọn tuỳ ý
D. f ≤ 2fc
30/08/2021 2 Lượt xem
Câu 2: Hệ thống có quỹ đạo nghiệm số như hình vẽ: 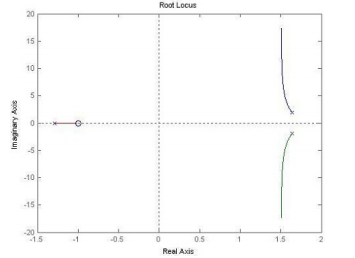
A. Hệ thống ổn định
B. Hệ thống không ổn định
C. Hệ thống nằm ở biên giới ổn định
D. Hệ thống có 4 nghiệm cực
30/08/2021 2 Lượt xem
Câu 3: Hàm truyền \(G(s) = \frac{{C(s)}}{{R(s)}}\) của hệ thống ở hình là
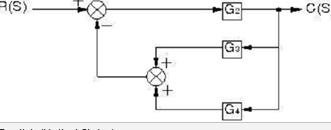
A. \(\frac{{{G_1}{G_3} + {G_2}G{}_3}}{{1 + {G_1}{G_3} + {G_2}G{}_3}}\)
B. \(\frac{{{G_1}{G_3} + {G_2}G{}_3}}{{1 + {G_1}{G_3} - {G_2}G{}_3}}\)
C. \(\frac{{{G_1}{G_3} - {G_2}G{}_3}}{{1 + {G_1}{G_3} + {G_2}G{}_3}}\)
D. \(\frac{{{G_1} + {G_2}}}{{1 - {G_1}{G_3} - {G_2}G{}_3}}\)
30/08/2021 2 Lượt xem
Câu 4: Hệ thống liên tục ổn định nếu tất cả các nghiệm của phương trình đặc tính:
A. Nằm bên phải mặt phẳng phức
B. Nằm trên trục ảo
C. Nằm bên trái mặt phẳng phức
D. Nằm trên trục thực
30/08/2021 4 Lượt xem
Câu 5: Quĩ đạo nghiệm số là:
A. Tập hợp tất cả các nghiệm của phương trình đặc tính của hệ thống khi có một thông số nào đó trong hệ thống thay đổi từ -∞ →0
B. Tập hợp tất cả các nghiệm của phương trình đặc tính của hệ thống khi có một thông số nào đó trong hệ thống thay đổi từ 0 →+∞
C. Tập hợp tất cả các nghiệm của phương trình đặc tính của hệ thống khi có một thông số nào đó trong hệ thống thay đổi từ -∞ →+∞
D. Tập hợp các zero của hệ thống
30/08/2021 2 Lượt xem
Câu 6: Tần số cắt biên:
A. Là tần số tại đó biên độ của đặc tính tần số bằng 1(hay bằng 0dB)
B. Là tần số tại đó pha của đặc tính tần số bằng -π (hay -1800 )
C. Là tần số tại đó có độ dự trữ biên
D. Là tần số tại đó có đỉnh cộng hưởng
30/08/2021 2 Lượt xem

Câu hỏi trong đề: Bộ câu hỏi trắc nghiệm Lý thuyết điều khiển tự động - Phần 2
- 145 Lượt thi
- 30 Phút
- 25 Câu hỏi
- Sinh viên
Cùng chủ đề Bộ câu hỏi trắc nghiệm Lý thuyết điều khiển tự động có đáp án

- 1.9K
- 164
- 20
-
 73 người đang thi
73 người đang thi

- 1.7K
- 114
- 25
-
18 người đang thi

- 1.1K
- 78
- 25
-
46 người đang thi

- 1.3K
- 64
- 25
-
61 người đang thi
Chia sẻ:
Đăng Nhập để viết bình luận