Câu hỏi:
Bộ chuyển đổi D/A:
A. Chuyển đổi tín hiệu tương tự sang tín hiệu số
B. Chuyển đổi tín hiệu số sang tín hiệu tương tự
C. Tương tự như khâu lấy mẫu dữ liệu
D. Sử dụng trong điều khiển robot
Câu 1: Hàm truyền \(G(s) = \frac{{C(s)}}{{R(s)}}\) của hệ thống ở hình là
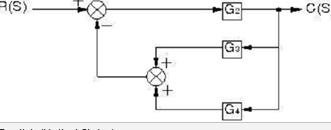
A. \(\frac{{{G_1}{G_3} + {G_2}G{}_3}}{{1 + {G_1}{G_3} + {G_2}G{}_3}}\)
B. \(\frac{{{G_1}{G_3} + {G_2}G{}_3}}{{1 + {G_1}{G_3} - {G_2}G{}_3}}\)
C. \(\frac{{{G_1}{G_3} - {G_2}G{}_3}}{{1 + {G_1}{G_3} + {G_2}G{}_3}}\)
D. \(\frac{{{G_1} + {G_2}}}{{1 - {G_1}{G_3} - {G_2}G{}_3}}\)
30/08/2021 2 Lượt xem
Câu 2: Tần số cắt biên:
A. Là tần số tại đó biên độ của đặc tính tần số bằng 1(hay bằng 0dB)
B. Là tần số tại đó pha của đặc tính tần số bằng -π (hay -1800 )
C. Là tần số tại đó có độ dự trữ biên
D. Là tần số tại đó có đỉnh cộng hưởng
30/08/2021 2 Lượt xem
Câu 3: Điều khiển là quá trình:
A. Thu thập thông tin
B. Tác động lên hệ thống để đáp ứng của hệ thống như mong muốn
C. Thu thập thông tin, xử lý thông tin và tác động lên hệ thống để đáp ứng của hệ thống gần với mong muốn
D. Thu thập và xử lý thông tin
30/08/2021 2 Lượt xem
Câu 4: Cho hệ có phương trình đặc trưng: \({s^4} + 2{s^3} + 2{s^2} + 8s + 1 = 0\)
A. Hệ thống ổn định, có 4 nghiệm nằm bên trái mặt phẳng phức
B. Hệ thống không ổn định, có 3 nghiệm có phần thực dương
C. Hệ thống không ổn định, có 2 nghiệm có phần thực dương
D. Hệ thống không ổn định, có 1 nghiệm có phần thực dương
30/08/2021 2 Lượt xem
Câu 5: Hệ phương trình trạng thái được mô tả dưới dạng ma trận, với: \(\left\{ \begin{array}{l} x(t) = Ax(t) + Br(t)\\ c(t) = Cx(t) \end{array} \right.\) ![]()
A. C là ma trân {1 x n}
B. C là ma trận {n x 1}
C. C là ma trận {n x n}
D. C là ma trận {n x m}, với n khác m
30/08/2021 4 Lượt xem
Câu 6: Quan hệ giữa tín hiệu vào và tín hiệu ra của hệ thống điều khiển rời rạc được mô tả bằng:
A. Phương trình vi phân
B. Phương trình sai phân
C. Phương trình đại số
D. Graph tín hiệu
30/08/2021 2 Lượt xem

Câu hỏi trong đề: Bộ câu hỏi trắc nghiệm Lý thuyết điều khiển tự động - Phần 2
- 145 Lượt thi
- 30 Phút
- 25 Câu hỏi
- Sinh viên
Cùng chủ đề Bộ câu hỏi trắc nghiệm Lý thuyết điều khiển tự động có đáp án

- 1.9K
- 164
- 20
-
 86 người đang thi
86 người đang thi

- 1.7K
- 114
- 25
-
67 người đang thi

- 1.1K
- 78
- 25
-
73 người đang thi

- 1.3K
- 64
- 25
-
15 người đang thi
Chia sẻ:
Đăng Nhập để viết bình luận