Câu hỏi:
Bộ bù trễ pha được sử dụng khi:
A. Muốn giảm sai số xác lập của hệ thống
B. Muốn tăng sai số xác lập của hệ thống
C. Muốn tăng thời gian đáp ứng quá độ của hệ thống
D. Tín hiệu vào của hệ thống là hàm nấc đơn vị
Câu 1: Hệ thống có quỹ đạo nghiệm số như hình vẽ: 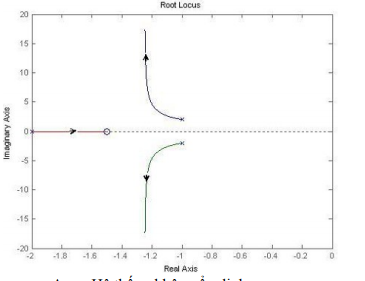
A. Hệ thống không ổn định
B. Hệ thống có 2 nghiệm cực và 1 zero
C. Hệ thống có 3 nghiệm cực
D. Hệ thống có 3 nghiệm cực và 1 zero
30/08/2021 2 Lượt xem
Câu 2: Hàm truyền \(G(s) = \frac{{C(s)}}{{R(s)}}\) của hệ thống ở hình là
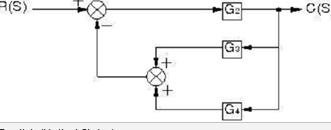
A. \(\frac{{{G_1}{G_3} + {G_2}G{}_3}}{{1 + {G_1}{G_3} + {G_2}G{}_3}}\)
B. \(\frac{{{G_1}{G_3} + {G_2}G{}_3}}{{1 + {G_1}{G_3} - {G_2}G{}_3}}\)
C. \(\frac{{{G_1}{G_3} - {G_2}G{}_3}}{{1 + {G_1}{G_3} + {G_2}G{}_3}}\)
D. \(\frac{{{G_1} + {G_2}}}{{1 - {G_1}{G_3} - {G_2}G{}_3}}\)
30/08/2021 2 Lượt xem
Câu 3: Chu kỳ lấy mẫu T là:
A. Khoảng thời gian giữa 2 lần lấy mẫu
B. Khoảng thời gian giữa 2 lần lấy mẫu liên tiếp
C. Khoảng thời gian lấy mẫu
D. Khoảng thời gian ngắn nhất mà tín hiệu lặp lại trạng thái ban đầu
30/08/2021 2 Lượt xem
Câu 4: Định nghĩa độ dự trữ ổn định:
A. Khoảng cách từ trục thực đến nghiệm cực gần nhất (nghiệm thực hoặc phức) được gọi là độ dự trữ ổn định của hệ
B. Khoảng cách từ trục ảo đến nghiệm cực gần nhất (nghiệm thực hoặc phức) được gọi là độ dự trữ ổn định của hệ
C. Khoảng cách từ trục hoành (ox) đến nghiệm gần nhất (chỉ nghiệm thực) được gọi là độ dự trữ ổn định của hệ
D. Khoảng cách từ trục tung (Oy) đến nghiệm cực gần nhất (chỉ nghiệm phức) được gọi là độ dự trữ ổn định của hệ
30/08/2021 3 Lượt xem
Câu 5: Theo định lý Shanon để có thể phục hồi dữ liệu sau khi lấy mẫu mà không bị méo dạng thì:
A. f=2fc
B. f ≥ 2fc
C. Tần số lấy mẫu được chọn tuỳ ý
D. f ≤ 2fc
30/08/2021 2 Lượt xem
Câu 6: Điều khiển là quá trình:
A. Thu thập thông tin
B. Tác động lên hệ thống để đáp ứng của hệ thống như mong muốn
C. Thu thập thông tin, xử lý thông tin và tác động lên hệ thống để đáp ứng của hệ thống gần với mong muốn
D. Thu thập và xử lý thông tin
30/08/2021 2 Lượt xem

Câu hỏi trong đề: Bộ câu hỏi trắc nghiệm Lý thuyết điều khiển tự động - Phần 2
- 145 Lượt thi
- 30 Phút
- 25 Câu hỏi
- Sinh viên
Cùng chủ đề Bộ câu hỏi trắc nghiệm Lý thuyết điều khiển tự động có đáp án

- 1.9K
- 164
- 20
-
 15 người đang thi
15 người đang thi

- 1.7K
- 114
- 25
-
97 người đang thi

- 1.1K
- 78
- 25
-
74 người đang thi

- 1.3K
- 64
- 25
-
71 người đang thi
Chia sẻ:
Đăng Nhập để viết bình luận