Câu hỏi:
Biểu đồ Bode được vẽ trong hệ tọa độ vuông góc, trong đó:
A. Trục hoành được chia tuyến tính
B. Trục hoành được chia theo thang logarith
C. Gồm nhiều nhánh xuất phát từ các cực và tiến đến các zêro hoặc tiến đến vô cùng theo các đường tiệm cận
D. n đọan thẳng
Câu 1: Quan hệ giữa tín hiệu vào và tín hiệu ra của hệ thống điều khiển rời rạc được mô tả bằng:
A. Phương trình vi phân
B. Phương trình sai phân
C. Phương trình đại số
D. Graph tín hiệu
30/08/2021 2 Lượt xem
Câu 2: Hệ thống hồi tiếp âm đơn vị; có hàm truyền vòng hở: \(G(s) = \frac{{K(s + 1)}}{{s{{(s + 2)}^2}(s + 5)}}\)
A. QĐNS có 3 nhánh
B. QĐNS có 3 nhánh tiến đến vô cùng và 1 nhánh tiến đến zero
C. QĐNS có 5 nhánh
D. QĐNS có 1 nhánh tiến đến zero và 2 nhánh tiến đến vô cùng
30/08/2021 2 Lượt xem
Câu 3: Hệ thống có quỹ đạo nghiệm số như hình vẽ: 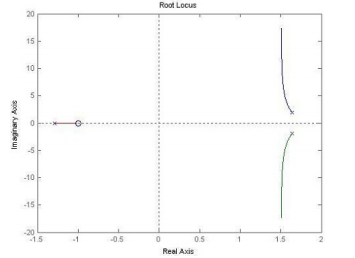
A. Hệ thống ổn định
B. Hệ thống không ổn định
C. Hệ thống nằm ở biên giới ổn định
D. Hệ thống có 4 nghiệm cực
30/08/2021 2 Lượt xem
Câu 4: Điều khiển là quá trình:
A. Thu thập thông tin
B. Tác động lên hệ thống để đáp ứng của hệ thống như mong muốn
C. Thu thập thông tin, xử lý thông tin và tác động lên hệ thống để đáp ứng của hệ thống gần với mong muốn
D. Thu thập và xử lý thông tin
30/08/2021 2 Lượt xem
Câu 5: Hệ thống liên tục ổn định nếu tất cả các nghiệm của phương trình đặc tính:
A. Nằm bên phải mặt phẳng phức
B. Nằm trên trục ảo
C. Nằm bên trái mặt phẳng phức
D. Nằm trên trục thực
30/08/2021 4 Lượt xem
Câu 6: Bộ chuyển đổi D/A:
A. Chuyển đổi tín hiệu tương tự sang tín hiệu số
B. Chuyển đổi tín hiệu số sang tín hiệu tương tự
C. Tương tự như khâu lấy mẫu dữ liệu
D. Sử dụng trong điều khiển robot
30/08/2021 2 Lượt xem

Câu hỏi trong đề: Bộ câu hỏi trắc nghiệm Lý thuyết điều khiển tự động - Phần 2
- 145 Lượt thi
- 30 Phút
- 25 Câu hỏi
- Sinh viên
Cùng chủ đề Bộ câu hỏi trắc nghiệm Lý thuyết điều khiển tự động có đáp án

- 1.9K
- 164
- 20
-
 66 người đang thi
66 người đang thi

- 1.7K
- 114
- 25
-
98 người đang thi

- 1.1K
- 78
- 25
-
69 người đang thi

- 1.3K
- 64
- 25
-
16 người đang thi
Chia sẻ:
Đăng Nhập để viết bình luận