Câu hỏi: Hàm truyền vòng kín của hệ thống hồi tiếp âm đơn vị là:
A. \({G_k}(s) = \frac{{G(s)}}{{1 + G(s)H(s)}}\)
B. \({G_k}(s) = \frac{{G(s)}}{{1 - G(s)}}\)
C. \({G_k}(s) = \frac{{G(s)H(s)}}{{1 - G(s)}}\)
D. \({G_k}(s) = \frac{{G(s)}}{{1 + G(s)}}\)
Câu 1: Cho hệ thống có phương trình đặc trưng: 2s4 +s3 + 3s2 + 2s + 2 = 0 . Bảng Routh của hệ thống được cho như sau: 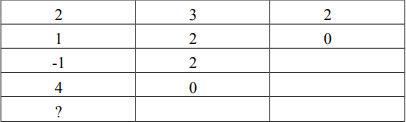
A. 2
B. 3
C. 4
D. 5
30/08/2021 3 Lượt xem
Câu 2: Cho hệ thống có phương trình đặc trưng: 2s4 +s3 + 3s2 + 2s + 2 = 0 . Bảng Routh của hệ thống được cho như sau: 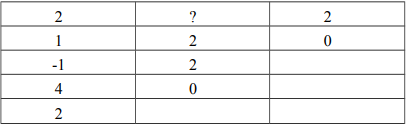
A. 2
B. 3
C. 4
D. 5
30/08/2021 2 Lượt xem
Câu 3: Hàm truyền đạt \(G(s) = \frac{{{V_o}(s)}}{{{V_i}(s)}}\) của mạch điện ở hình sau là:
A. \(\frac{{{R_2}}}{{{R_1}}} + {R_2}Cs\)
B. \(- \frac{{{R_2}}}{{{R_1}}} - {R_2}Cs\)
C. \(\frac{{{R_2}}}{{{R_1}}} - {R_2}Cs\)
D. \(\frac{{{R_2}}}{{{R_1}}} + {R_2}Cs\)
30/08/2021 2 Lượt xem
Câu 4: Cho hệ có phương trình đặc trưng s3+(K+2)s2+2Ks+10=0 . Hãy xác định K để hệ thống ổn định:
A. K >-2
B. K >0
C. K >1,45
D. K >2
30/08/2021 3 Lượt xem
Câu 5: Hàm truyền của hiệu chỉnh vi phân tỉ lệ PD (proportional derivative) liên tục có dạng:
A. \({G_C}(s) = {K_p} + {K_D}\)
B. \({G_C}(s) = {K_p} + {K_D}s\)
C. \({G_C}(s) = {K_p}s + {K_D}\)
D. \({G_C}(s) = {K_p} + \frac{{{K_D}}}{s}\)
30/08/2021 2 Lượt xem
Câu 6: Cho hệ thống hở có đặc tính tần số như hình vẽ . Xét tính ổn định của hệ thống:
A. Hệ thống ở biên giới ổn định
B. Hệ thống không ổn định
C. Hệ thống ổn định
D. Đường cong Nyquist bao điểm (1,j0) 2 vòng theo chiều dương
30/08/2021 4 Lượt xem

Câu hỏi trong đề: Bộ câu hỏi trắc nghiệm Lý thuyết điều khiển tự động - Phần 3
- 114 Lượt thi
- 30 Phút
- 25 Câu hỏi
- Sinh viên
Cùng chủ đề Bộ câu hỏi trắc nghiệm Lý thuyết điều khiển tự động có đáp án

- 1.9K
- 145
- 25
-
 96 người đang thi
96 người đang thi

- 1.9K
- 164
- 20
-
79 người đang thi

- 1.1K
- 78
- 25
-
11 người đang thi

- 1.3K
- 64
- 25
-
95 người đang thi
Chia sẻ:
Đăng Nhập để viết bình luận