Câu hỏi: Hàm truyền \(G(s) = \frac{{C(s)}}{{R(s)}}\) của hệ thống ở hình trên là:
A. \(\frac{{{G_2}}}{{1 + {G_2}({G_3} - {G_4})}}\)
B. \(\frac{{{G_2}}}{{1 + {G_2}({G_3} + {G_4})}}\)
C. \(\frac{{{G_2}}}{{1 - {G_2}({G_3} + {G_4})}}\)
D. \(\frac{{{G_2}}}{{1 - {G_2}({G_3} - {G_4})}}\)
Câu 1: Cho hàm truyền \(G(s) = \frac{5}{{{s^3} + 8{s^2} + 9s + 2}}\) hãy lập phương trình trạng thái:
A. \(A = \left[ {\begin{array}{*{20}{c}} 0&1&0\\ 0&0&1\\ { - 2}&{ - 9}&{ - 8} \end{array}} \right]{\rm{ ; B = }}\left[ \begin{array}{l} 0\\ 0\\ 5 \end{array} \right]{\rm{ ; C = }}\left[ {1{\rm{ 0 0}}} \right];\)
B. \(A = \left[ {\begin{array}{*{20}{c}} 0&1&0\\ 0&0&1\\ 2&9&8 \end{array}} \right]{\rm{ ; B = }}\left[ \begin{array}{l} 0\\ 0\\ 5 \end{array} \right]{\rm{ ; C = }}\left[ {1{\rm{ 0 0}}} \right];\)
C. \(A = \left[ {\begin{array}{*{20}{c}} 0&1&0\\ 0&0&1\\ { - 2}&{ - 9}&{ - 8} \end{array}} \right]{\rm{ ; B = }}\left[ \begin{array}{l} 0\\ 0\\ 2 \end{array} \right]{\rm{ ; C = }}\left[ {1{\rm{ 1 0}}} \right];\)
D. \(A = \left[ {\begin{array}{*{20}{c}} 1&1&0\\ 0&0&1\\ { - 2}&{ - 9}&{ - 8} \end{array}} \right]{\rm{ ; B = }}\left[ \begin{array}{l} 0\\ 1\\ 2 \end{array} \right]{\rm{ ; C = }}\left[ {1{\rm{ 0 0}}} \right];\)
30/08/2021 4 Lượt xem
Câu 2: Hàm truyền của hiệu chỉnh vi phân tỉ lệ PD (proportional derivative) liên tục có dạng:
A. \({G_C}(s) = {K_p} + {K_D}\)
B. \({G_C}(s) = {K_p} + {K_D}s\)
C. \({G_C}(s) = {K_p}s + {K_D}\)
D. \({G_C}(s) = {K_p} + \frac{{{K_D}}}{s}\)
30/08/2021 2 Lượt xem
Câu 3: Cho hàm truyền ,hãy lập phương trình trạng thái:
A. \(A = \left[ {\begin{array}{*{20}{c}} 0&1&0\\ 0&{ - 2}&1\\ 0&0&{ - 3} \end{array}} \right]{\rm{ ; B = }}\left[ \begin{array}{l} 0\\ 0\\ 6 \end{array} \right]{\rm{ ; C = }}\left[ {1{\rm{ 0 0}}} \right];\)
B. \(A = \left[ {\begin{array}{*{20}{c}} 0&1&0\\ 0&0&1\\ { - 6}&{ - 11}&{ - 6} \end{array}} \right]{\rm{ ; B = }}\left[ \begin{array}{l} 0\\ 0\\ 6 \end{array} \right]{\rm{ ; C = }}\left[ {1{\rm{ 0 0}}} \right];\)
C. \(A = \left[ {\begin{array}{*{20}{c}} 0&1&0\\ 0&0&1\\ 6&{11}&6 \end{array}} \right]{\rm{ ; B = }}\left[ \begin{array}{l} 0\\ 0\\ 6 \end{array} \right]{\rm{ ; C = }}\left[ {1{\rm{ 0 0}}} \right];\)
D. \(A = \left[ {\begin{array}{*{20}{c}} { - 1}&1&0\\ 0&0&1\\ 6&{11}&6 \end{array}} \right]{\rm{ ; B = }}\left[ \begin{array}{l} 0\\ 3\\ 6 \end{array} \right]{\rm{ ; C = }}\left[ {1{\rm{ 0 0}}} \right];\)
30/08/2021 2 Lượt xem
Câu 4: Cho hệ thống có phương trình đặc trưng: 2s4 +s3 + 3s2 + 2s + 2 = 0 . Bảng Routh của hệ thống được cho như sau: 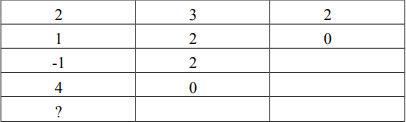
A. 2
B. 3
C. 4
D. 5
30/08/2021 3 Lượt xem
Câu 5: Điều kiện cần để hệ thống liên tục ổn định theo tiêu chuẩn ổn định đại số là:
A. Tất cả các hệ số của phương trình đặc trưng phải khác không và cùng dấu
B. Tất cả các hệ số của phương trình đặc trưng phải khác không
C. Tất cả các hệ số của phương trình đặc trưng phải cùng dấu
D. Tất cả các hệ số của phương trình đặc trưng phải dương
30/08/2021 2 Lượt xem
Câu 6: Hàm truyền của hiệu chỉnh tỉ lệ P (proportional) liên tục có dạng:
A. \({G_C}(s) = {K_p} + {K_D}s\)
B. \({G_C}(s) = {K_p}s + {K_D}\)
C. \({G_C}(s) = {K_p} + \frac{{{K_D}}}{s}\)
D. \({G_C}(s) = {K_p}\)
30/08/2021 2 Lượt xem

Câu hỏi trong đề: Bộ câu hỏi trắc nghiệm Lý thuyết điều khiển tự động - Phần 3
- 114 Lượt thi
- 30 Phút
- 25 Câu hỏi
- Sinh viên
Cùng chủ đề Bộ câu hỏi trắc nghiệm Lý thuyết điều khiển tự động có đáp án

- 1.9K
- 145
- 25
-
 42 người đang thi
42 người đang thi

- 1.9K
- 164
- 20
-
85 người đang thi

- 1.1K
- 78
- 25
-
90 người đang thi

- 1.3K
- 64
- 25
-
60 người đang thi
Chia sẻ:
Đăng Nhập để viết bình luận