Câu hỏi:
Cho hệ thống hồi tiếp âm đơn vị sau. Sai số xác lập exl là: 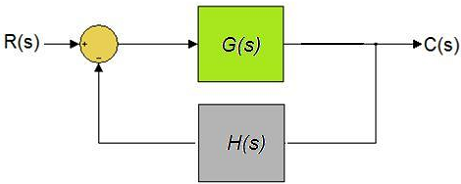
A. \({e_{xl}} = \mathop {\lim }\limits_{t \to \infty } e(t) = \mathop {\lim }\limits_{s \to 0} \frac{{sR(s)}}{{1 + G(s)H(s)}}\)
B. \({e_{xl}} = \mathop {\lim }\limits_{t \to 0} e(t) = \mathop {\lim }\limits_{s \to \infty } \frac{{sR(s)}}{{1 + G(s)H(s)}}\)
C. \({e_{xl}} = \mathop {\lim }\limits_{t \to \infty } e(t) = \mathop {\lim }\limits_{s \to 0} \frac{{R(s)}}{{1 + G(s)}}\)
D. \({e_{xl}} = \mathop {\lim }\limits_{t \to \infty } e(t) = \mathop {\lim }\limits_{s \to 0} \frac{{sG(s)}}{{1 + R(s)G(s)}}\)
Câu 1: Cho hệ thống có hàm truyền tương đương sau: ![]()
A. Hệ thống ổn định, có 3 nghiệm cực bên trái mặt phẳng phức
B. Hệ thống ổn định, có 2 nghiệm cực nằm bên trái mặt phẳng phức
C. Hệ thống không ổn định, có 2 nghiệm cực bên phải mặt phẳng phức, 1 nghiệm cực bên trái mặt phẳng phức
D. Hệ thống ở biên giới ổn định
30/08/2021 2 Lượt xem
Câu 2: Tiêu chuẩn IAE (Integral of the Absolute magnitude of the Error - tích phân trị tuyệt đối biên độ sai số ):
A. \({J_1} = \int\limits_{ - \infty }^{ + \infty } {|e(t)|dt}\)
B. \({J_1} = \int\limits_0^{ + 1} {|e(t)|dt} \)
C. \({J_1} = \int\limits_0^{ + \infty } {|e(t)|dt}\)
D. \({J_1} = \int\limits_{ - \infty }^{ + \infty } {|e(t)|dt} \)
30/08/2021 2 Lượt xem
Câu 3: Hàm truyền đạt \(G(s) = \frac{{{V_o}(s)}}{{{V_i}(s)}}{\cos ^{ - 1}}\theta \) của mạch điện ở hình sau là: 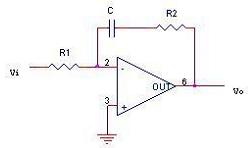
A. \(- \frac{{{R_2}}}{{{R_1}}} - \frac{1}{{{R_1}Cs}}\)
B. \(- \frac{{{R_2}}}{{{R_1}}} + \frac{1}{{{R_1}Cs}}\)
C. \(\frac{{{R_2}}}{{{R_1}}} + \frac{1}{{{R_1}Cs}}\)
D. \( - \frac{{{R_1}}}{{{R_2}}} - \frac{1}{{{R_1}Cs}}\)
30/08/2021 3 Lượt xem
Câu 4: Hàm truyền tương đương của hệ thống hồi tiếp như hình vẽ là: 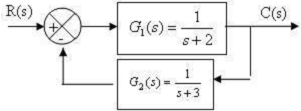
A. \({G_{td}}(s) = \frac{{s + 3}}{{{s^2} + 5s + 7}}\)
B. \({G_{td}}(s) = \frac{{s + 2}}{{{s^2} + 5s + 7}}\)
C. \({G_{td}}(s) = \frac{1}{{{s^2} + 5s + 2}}\)
D. \({G_{td}}(s) = \frac{{s + 2}}{{{s^2} + 5s + 6}}\)
30/08/2021 2 Lượt xem
Câu 5: Hệ thống rời rạc là ổn định nếu tất cả các nghiệm của phương trình đặc tính:
A. Nằm bên trái mặt phẳng phức
B. Nằm bên trong vòng tròn đơn vị
C. Nằm bên ngoài vòng tròn đơn vị
D. Nằm bên phải mặt phẳng phức
30/08/2021 3 Lượt xem
Câu 6: Hàm truyền của hệ thống:
A. Là tỉ số giữa tín hiệu ra và tín hiệu vào
B. Là tỉ số giữa biến đổi Laplace của tín hiệu ra và biến đổi Laplace của tín hiệu vào khi điều kiện đầu bằng 0
C. Phụ thuộc vào tín hiệu ra và tín hiệu vào
D. Mô tả chức năng của các phần tử và sự tác động qua lại giữa chúng trong hệ
30/08/2021 2 Lượt xem

Câu hỏi trong đề: Bộ câu hỏi trắc nghiệm Lý thuyết điều khiển tự động - Phần 8
- 58 Lượt thi
- 30 Phút
- 25 Câu hỏi
- Sinh viên
Cùng chủ đề Bộ câu hỏi trắc nghiệm Lý thuyết điều khiển tự động có đáp án

- 1.9K
- 145
- 25
-
 39 người đang thi
39 người đang thi

- 1.9K
- 164
- 20
-
39 người đang thi

- 1.7K
- 114
- 25
-
39 người đang thi

- 1.1K
- 78
- 25
-
19 người đang thi
Chia sẻ:
Đăng Nhập để viết bình luận