Câu hỏi: Các khâu động học cơ bản bao gồm?
A. Khâu nguyên hàm, khâu tích phân
B. Khâu vi phân, khâu trễ, khâu nguyên hàm
C. Khâu tích phân, khâu trễ, khâu nguyên hàm
D. Khâu nguyên hàm,khâu tích phân, khâu vi phân và khâu trễ
Câu 1: Hàm truyền vòng kín của hệ thống hồi tiếp âm là:
A. \(\frac{{G(s)}}{{1 + G(s)H(s)}}\)
B. \(\frac{{G(s)}}{{1 + H(s)}}\)
C. \(\frac{1}{{1 + G(s)H(s)}}\)
D. \(\frac{{G(s)}}{{1 + G(s)}}\)
30/08/2021 3 Lượt xem
Câu 2: Khâu tích phân lý tưởng có hàm truyền G(s) =1/s:
A. L(ω)= ω ; φ(ω)=90o
B. L(ω)= 1/ω ; φ(ω)=90o
C. L(ω)= 20lg(ω) ; φ(ω)= -90o
D. L(ω)= -20lg(ω) ; φ(ω)= -90o
30/08/2021 2 Lượt xem
Câu 3: Trong khâu quán tính bậc nhất đặc tính tần số biên – pha của phần tử được biểu diễn qua công thức: [R(ω)-k/2]2 + I2(ω) = (k/2)2 đồ thị của nó là?
A. Đường tròn có tâm (k/2, 0) bán kính k/2
B. Đường tròn có tâm (0, 0) bán kính k/2
C. Đường tròn có tâm (k/2, 0) bán kính (k/2)2
D. Đường tròn có tâm (0, k/2) bán kính k/2
30/08/2021 2 Lượt xem
Câu 4: Phương trình đặc tính của hệ thống như hình vẽ là? 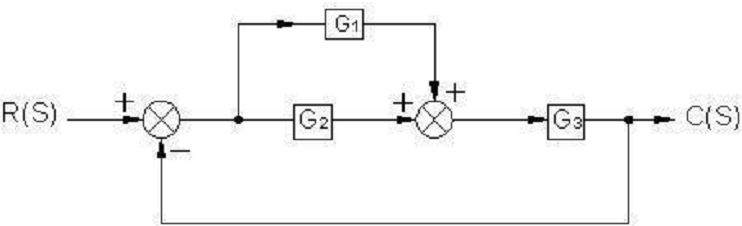
A. 1+G1G3-G2G3 = 0
B. 1+G1G3+G2G3 = 0
C. 1-G2(G3 + G1) = 0
D. 1-G2(G3 – G1) = 0
30/08/2021 3 Lượt xem
Câu 5: Hệ thống tuyến tính được mô tả bởi phương trình trạng thái cấp 2: ![]()
A. k ≠ -2
B. k ≠ -3
C. k ≠ -4
D. k ≠ -5
30/08/2021 2 Lượt xem
Câu 6: Biểu thức sai số xác lập cho hệ thống sau:
A. \({e_{xl}} = \mathop {\lim }\limits_{s \to 0} \frac{{sR(s)}}{{1 + G(s)H(s)}}\)
B. \({e_{xl}} = \mathop {\lim }\limits_{s \to \infty } \frac{{sR(s)}}{{1 + G(s)H(s)}}\)
C. \({e_{xl}} = \mathop {\lim }\limits_{s \to \infty } \frac{{R(s)}}{{1 + G(s)H(s)}}\)
D. \({e_{xl}} = \mathop {\lim }\limits_{s \to 0} \frac{{sR(s)}}{{1 + H(s)}}\)
30/08/2021 3 Lượt xem

Câu hỏi trong đề: Bộ câu hỏi trắc nghiệm Lý thuyết điều khiển tự động - Phần 4
- 78 Lượt thi
- 30 Phút
- 25 Câu hỏi
- Sinh viên
Cùng chủ đề Bộ câu hỏi trắc nghiệm Lý thuyết điều khiển tự động có đáp án

- 1.9K
- 145
- 25
-
 49 người đang thi
49 người đang thi

- 1.9K
- 164
- 20
-
29 người đang thi

- 1.7K
- 114
- 25
-
20 người đang thi

- 1.3K
- 64
- 25
-
71 người đang thi
Chia sẻ:
Đăng Nhập để viết bình luận