Câu hỏi: Cho biết có mấy vị trí cân bằng ổn định trong hình sau:
A. 1
B. 2
C. 3
D. 4
Câu 1: Tần số cắt pha ω-πlà tần số tại đó pha của đặc tính tần số:
A. φ(ω-π) = -90o
B. φ(ω-π)= -45o
C. φ(ω-π) = 180o
D. φ(ω-π) = -180o
30/08/2021 2 Lượt xem
Câu 2: Phương trình đặc tính của hệ thống như hình vẽ là? 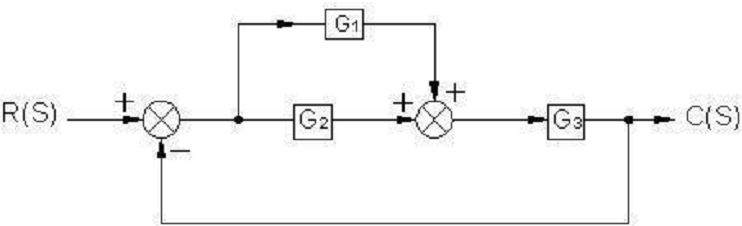
A. 1+G1G3-G2G3 = 0
B. 1+G1G3+G2G3 = 0
C. 1-G2(G3 + G1) = 0
D. 1-G2(G3 – G1) = 0
30/08/2021 3 Lượt xem
Câu 3: Hàm truyền vòng kín của hệ thống hồi tiếp âm là:
A. \(\frac{{G(s)}}{{1 + G(s)H(s)}}\)
B. \(\frac{{G(s)}}{{1 + H(s)}}\)
C. \(\frac{1}{{1 + G(s)H(s)}}\)
D. \(\frac{{G(s)}}{{1 + G(s)}}\)
30/08/2021 3 Lượt xem
Câu 4: Hệ thống tuyến tính được mô tả bởi phương trình trạng thái cấp 2: ![]()
A. k ≠ -2
B. k ≠ -3
C. k ≠ -4
D. k ≠ -5
30/08/2021 2 Lượt xem
Câu 5: Phương trình đặc tính của hệ thống như hình vẽ là? 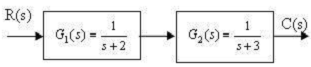
A. s2+5s+6 = 0
B. s2+5s-6 = 0
C. s2-5s+6 = 0
D. s2-5s-6 = 0
30/08/2021 2 Lượt xem
Câu 6: Cho biết vị trí cân bằng ở biên giới ổn định trong hình sau:
A. Vị trí a
B. Vị trí b
C. Vị trí c
D. Vị trí d
30/08/2021 3 Lượt xem

Câu hỏi trong đề: Bộ câu hỏi trắc nghiệm Lý thuyết điều khiển tự động - Phần 4
- 78 Lượt thi
- 30 Phút
- 25 Câu hỏi
- Sinh viên
Cùng chủ đề Bộ câu hỏi trắc nghiệm Lý thuyết điều khiển tự động có đáp án

- 1.9K
- 145
- 25
-
 57 người đang thi
57 người đang thi

- 1.9K
- 164
- 20
-
32 người đang thi

- 1.7K
- 114
- 25
-
22 người đang thi

- 1.3K
- 64
- 25
-
30 người đang thi
Chia sẻ:
Đăng Nhập để viết bình luận