Câu hỏi: Một hệ thống điều khiển tự động gồm những thành phần cơ bản nào?
A. Đối tượng điều khiển, thiết bị điều khiển và thiết bị đo lường
B. Thiết bị điều khiển, thiết bị đo lường
C. Đối tượng điều khiển, thiết bị điều khiển
D. Đối tượng điều khiển, thiết bị đo lường
Câu 1: Cho hàm truyền \(G(s) = \frac{{20}}{{{s^2} + 2s + 1}}\) ,hãy lập phương trình trạng thái
A. \(A = \left[ {\begin{array}{*{20}{c}} 0&1\\ { - 3}&{ - 8} \end{array}} \right]{\rm{ ; B = }}\left[ \begin{array}{l} 20\\ 0 \end{array} \right]{\rm{ ; C = }}\left[ {\begin{array}{*{20}{c}} 1&0 \end{array}} \right]\)
B. \(A = \left[ {\begin{array}{*{20}{c}} 0&1\\ { - 1}&{ - 2} \end{array}} \right]{\rm{ ; B = }}\left[ \begin{array}{l} 0\\ 20 \end{array} \right]{\rm{ ; C = }}\left[ {\begin{array}{*{20}{c}} 1&0 \end{array}} \right]\)
C. \(A = \left[ {\begin{array}{*{20}{c}} 0&1\\ { - 3}&{ - 2} \end{array}} \right]{\rm{ ; B = }}\left[ \begin{array}{l} 0\\ 20 \end{array} \right]{\rm{ ; C = }}\left[ {\begin{array}{*{20}{c}} 1&0 \end{array}} \right]\)
D. \(A = \left[ {\begin{array}{*{20}{c}} 1&1\\ { - 2}&{ - 8} \end{array}} \right]{\rm{ ; B = }}\left[ \begin{array}{l} 20\\ 0 \end{array} \right]{\rm{ ; C = }}\left[ {\begin{array}{*{20}{c}} 1&0 \end{array}} \right]\)
30/08/2021 2 Lượt xem
Câu 2: Hệ thống có biểu đồ Bode biên và Bode pha của hệ hở như hình vẽ sau đây thì hệ kín: 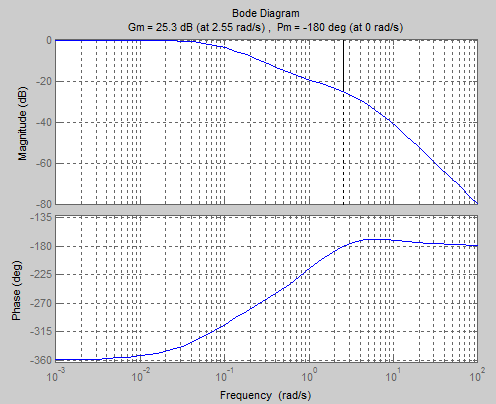
A. Ổn định
B. Không ổn định
C. Ở biên giới ổn định
D. Chưa xác định
30/08/2021 2 Lượt xem
Câu 3: Cho hàm truyền \(G(s) = \frac{{20}}{{{s^2} + 2s - 3}}\) ,hãy lập phương trình trạng thái
A. \(A = \left[ {\begin{array}{*{20}{c}} 0&3\\ { - 3}&{ - 2} \end{array}} \right]{\rm{ ; B = }}\left[ \begin{array}{l} 20\\ 0 \end{array} \right]{\rm{ ; C = }}\left[ {\begin{array}{*{20}{c}} 1&0 \end{array}} \right]\)
B. \(A = \left[ {\begin{array}{*{20}{c}} 0&1\\ { - 2}&{ - 1} \end{array}} \right]{\rm{ ; B = }}\left[ \begin{array}{l} 0\\ 20 \end{array} \right]{\rm{ ; C = }}\left[ {\begin{array}{*{20}{c}} 1&0 \end{array}} \right]\)
C. \(A = \left[ {\begin{array}{*{20}{c}} 1&1\\ { - 8}&{ - 2} \end{array}} \right]{\rm{ ; B = }}\left[ \begin{array}{l} 0\\ 20 \end{array} \right]{\rm{ ; C = }}\left[ {\begin{array}{*{20}{c}} 1&0 \end{array}} \right]\)
D. \(A = \left[ {\begin{array}{*{20}{c}} 0&1\\ 3&{ - 2} \end{array}} \right]{\rm{ ; B = }}\left[ \begin{array}{l} 0\\ 20 \end{array} \right]{\rm{ ; C = }}\left[ {\begin{array}{*{20}{c}} 1&0 \end{array}} \right]\)
30/08/2021 2 Lượt xem
Câu 4: Hệ thống có biểu đồ Bode biên và Bode pha của hệ hở như hình vẽ sau đây thì hệ kín: 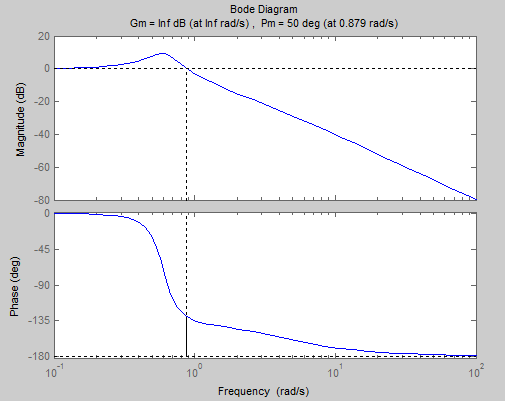
A. Ổn định
B. Không ổn định
C. Ở biên giới ổn định
D. Chưa xác định
30/08/2021 2 Lượt xem
Câu 5: Cho sơ đồ khối hệ thống điều khiển như hình vẽ, tín hiệu ngõ ra là: 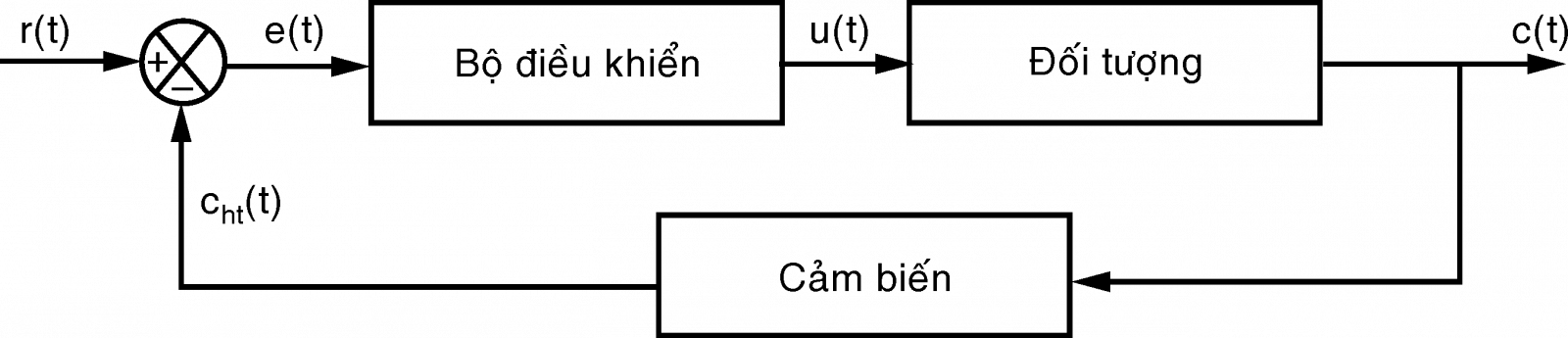
A. u(t)
B. c(t)
C. r(t)
D. e(t)
30/08/2021 3 Lượt xem
Câu 6: Hệ thống có biểu đồ Bode biên và Bode pha của hệ hở như hình vẽ sau đây thì hệ kín: 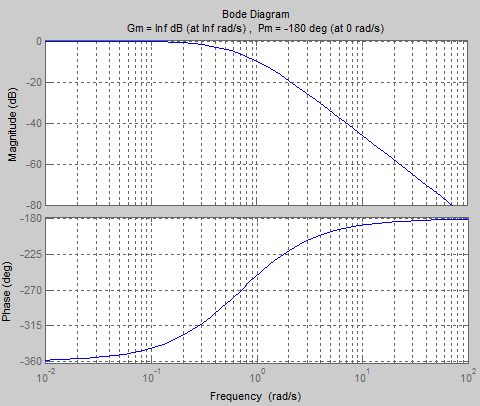
A. Ổn định
B. Không ổn định
C. Ở biên giới ổn định
D. Chưa xác định
30/08/2021 2 Lượt xem

Câu hỏi trong đề: Bộ câu hỏi trắc nghiệm Lý thuyết điều khiển tự động - Phần 7
- 48 Lượt thi
- 30 Phút
- 25 Câu hỏi
- Sinh viên
Cùng chủ đề Bộ câu hỏi trắc nghiệm Lý thuyết điều khiển tự động có đáp án

- 1.9K
- 145
- 25
-
 94 người đang thi
94 người đang thi

- 1.9K
- 164
- 20
-
62 người đang thi

- 1.7K
- 114
- 25
-
78 người đang thi

- 1.1K
- 78
- 25
-
84 người đang thi
Chia sẻ:
Đăng Nhập để viết bình luận